Research Center for Brain-inspired Intelligence
Institute of Automation, Chinese Academy of Sciences
Institute of Automation, Chinese Academy of Sciences
| About Neuro-Robotics Group | |
The core task of Neuro-Robotics Group (NRG) is to research and develop the next generation of intelligent robot system, by imitating and learning the mechanics of the human neural system. Currently, NRG is conducting the CASIA Motor Brain Project and studying the mechanics of Conscious movement and subconscious movement simultaneously. Up to now, the basic model has been established and a hardware platform is being built to test and exhibit the results. A series of related papers have been published on IEEE Transactions, and NRG is invited by Frontiers in Computational Neuroscience to organize a special issue on this field. More details of our research are as follows. Conscious movement is movement with one's comprehensive coordination and correction; such movement is closely related to feedback information from target and surrounding environment. During the conscious movement procedure, we have built frameworks for the environment information processing, which have the memory and association, active adjustment and learning abilities. In detail, the main work is: 1) Semantic and Episodic Information Learning: Based on the coding and encoding mode of the brain for the environment information, especially the semantic and episodic information, a hierarchical algorithm is used to learn the semantic and episodic information effectively and robustly. 2) Memory and Association: A brain-like memory and association mode is used to memorize and retrieve the learned semantic and episodic information, and this structure could help faster and more robust decision. 3) Active Adjustment: For the information change and interference associated with the task, based on the attention mechanism of brain, an active adjustment mode is used to learn and memorize the essential information effectively and robustly. 4) Active Feed-forward Learning: A brain-like multi-layer neural network is used to learn the environmental information without supervision, and the key components of the information are learned incrementally, which improves the accuracy and efficiency of the learning algorithm. The brain-like information processing framework and the demonstration platform are shown in Fig. 1 and Fig.2. Fig 1.The brain-like information processing framework, which illustrates the mechanism introduction of memory and association, active adjustment and learning abilities.  Fig 2. The demonstration platform of brain-like information processing framework. The platform shows the positions of brain cortexes which process the visual information during the whole processing procedure. Subconscious movement is movement without conscious computation or correction and mainly depends on the way human’s motor neural system encodes certain movements. During the subconscious movement procedure, based on the ‘Brain-Cerebellum-Spinal cord’ pathway of the motor signal, we propose a new motion model of upper limb extremity to mimic the information propagation between the cerebellum and spinal cord. The proposed motion model has proven to have a fast response and learning ability. Thus, it might also take an important guiding significance for the robotics and other complex systems’ structure design and control. The simulation model and result are presented in Fig. 3. 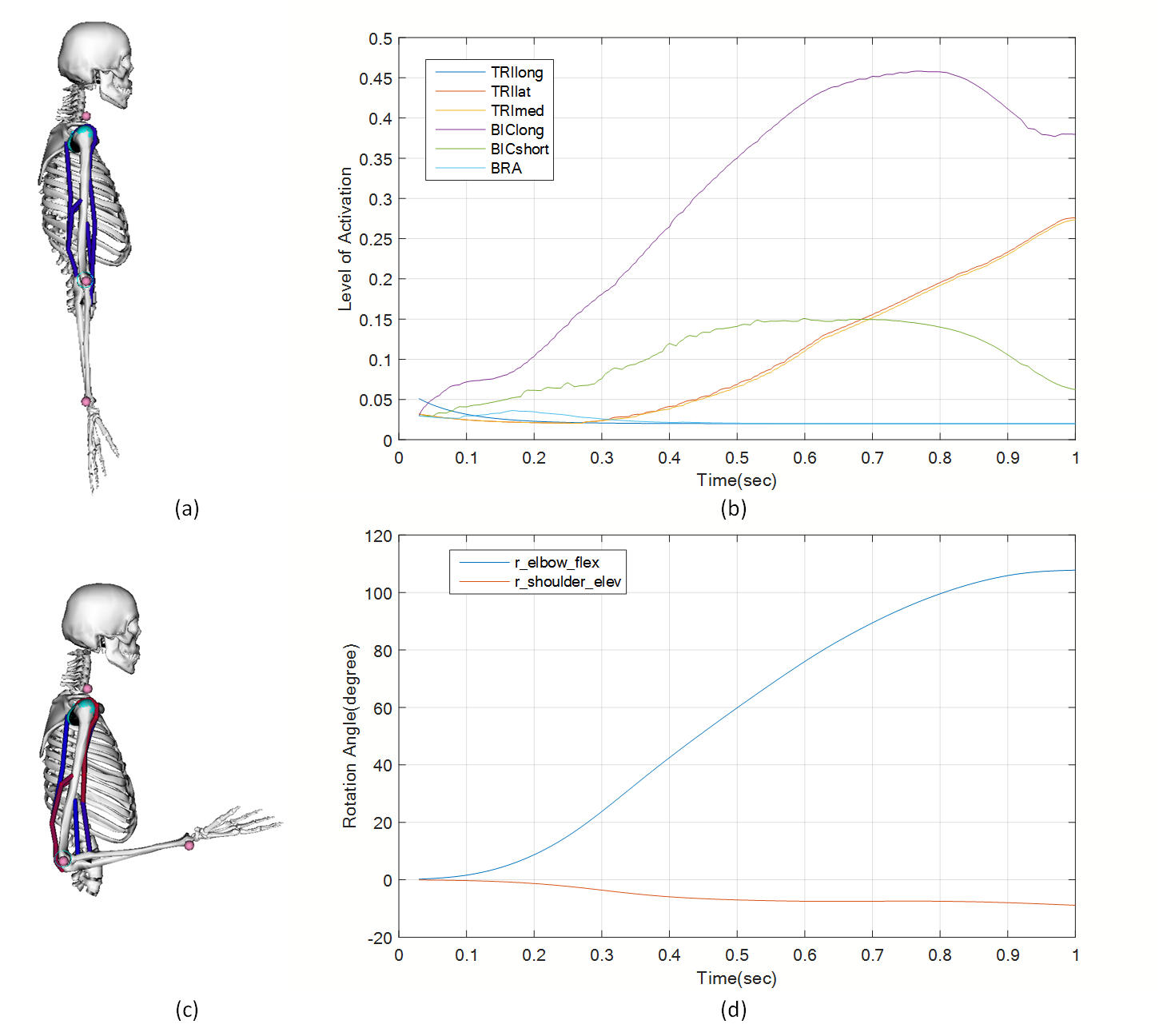 Fig 3. Illustration of the upper limb model and the simulation result. (a) shows the initial state of the upper limb. (b) is the neural excitation of each muscle in time. (c) is the final state of the upper limb with neural excitation in (b). (d) is the angles that the two joints rotate with time. |